一、基础认知:伺服电机的核心定义与本质特征
什么是伺服电机?它与普通电机的核心区别在哪里?
伺服电机是一种能精准响应控制指令,实现位置、速度和力矩精确调控的执行机构,本质是依托闭环反馈系统运行的精密机电一体化设备。其与普通电机的核心区别体现在控制机制上:普通电机多为开环运行,通电后转速和位置易受负载、电压波动影响,无法主动纠偏;而伺服电机通过内置传感器形成闭环回路,能实时对比目标值与实际值并动态修正误差,实现高精度控制。
为什么说伺服电机必须配套专用设备才能工作?
伺服电机并非 “接通电源就能运转” 的独立设备,其正常运行依赖 “电机本体 + 伺服驱动器 + 位置 / 速度传感器” 组成的完整系统。驱动器作为核心控制单元,负责接收上位指令、处理反馈信号、通过 PID 算法生成校正指令并放大功率;传感器实时采集运行数据并反馈给驱动器;电机本体则根据驱动信号产生运动,三者缺一不可。
二、核心构成:伺服电机系统的关键组成部分
伺服电机系统的三大核心组件分别是什么?各自承担哪些功能?
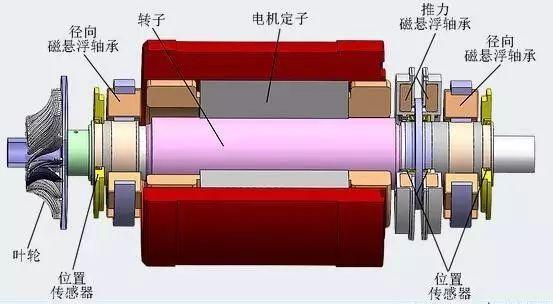
系统主要由电机本体、位置 / 速度传感器、伺服驱动器三大组件构成。电机本体通常为交流永磁同步电机或直流无刷电机,通过电磁感应产生旋转或直线运动,是动力输出的核心;位置 / 速度传感器以编码器或旋转变压器为主,紧密安装在电机轴上,实时测量转子位置、速度和方向并转换为电信号;伺服驱动器作为 “大脑”,负责接收指令、处理反馈、计算误差、输出驱动信号,同时提供通信接口实现设备联动。
编码器在伺服系统中扮演什么角色?其精度对系统有何影响?
编码器是伺服系统的 “眼睛”,是实现闭环控制的关键部件。它通过光栅盘或磁环等结构将机械运动转换为电信号,为驱动器提供实时的位置和速度反馈,确保驱动器能准确计算误差并修正。编码器精度直接决定系统控制精度,例如 20 位编码器分辨率可达 1048576 脉冲 / 转,能实现角秒级的定位精度,而低分辨率编码器则会限制系统的控制效果。
伺服驱动器中的 PID 控制算法有什么作用?
PID 控制算法是驱动器实现精准调控的核心技术,通过比例(P)、积分(I)、微分(D)三个环节的协同计算,动态调整输出到电机的电流或电压。在位置模式下,它能控制电机平稳加速接近目标位置并减速制动,避免过冲;速度模式下可快速补偿负载变化导致的转速波动;力矩模式则能根据负载反力矩调整输出,维持设定力矩稳定,是实现高精度、高响应性的关键。
三、工作机制:闭环控制的运行逻辑与模式
伺服电机的闭环反馈控制流程是如何实现的?
闭环控制流程通过六个步骤循环执行:第一步,上位控制器发出目标位置、速度或力矩指令;第二步,驱动器输出功率信号驱动电机运转;第三步,传感器实时检测电机实际运行参数并反馈;第四步,驱动器对比目标值与实际值计算误差;第五步,通过 PID 算法生成校正指令,调整输出功率修正误差;第六步,持续循环上述过程直至误差趋于零并稳定运行,整个周期可达毫秒级甚至微秒级。
伺服电机常见的控制模式有哪几种?各自适用于哪些场景?
主要分为三种控制模式:位置控制模式可精确控制电机旋转角度或移动距离,是最常用的模式,适用于贴片机、CNC 加工中心等需要精准定位的设备;速度控制模式能稳定维持设定转速,适合流水线传送带、风机等对转速稳定性要求高的场景;力矩控制模式可精确控制输出力或扭矩,常用于卷绕设备、恒力压装等需要控制作用力的场合。
四、性能对比:与步进电机的关键差异
伺服电机与步进电机在控制方式上有本质区别吗?
两者存在本质区别:步进电机采用开环控制,驱动器发送脉冲序列驱动转子按固定步距角转动,无位置反馈,假定转子严格跟随指令,若出现失步无法自行纠正;伺服电机则为闭环控制,通过编码器实时反馈运行状态,驱动器持续对比指令与实际值并修正误差,能主动补偿干扰导致的偏差。
在精度和速度特性上,伺服电机与步进电机有哪些差异?
精度方面,步进电机精度取决于步距角(通常为 0.9° 或 1.8°),高速或负载变化时易失步且产生累积误差;伺服电机依靠高分辨率编码器和闭环控制,精度可达微米级或角秒级,无累积误差。速度特性上,步进电机低速扭矩大但高速时扭矩显著下降,存在共振区;伺服电机在宽转速范围内(可达几千 RPM)能保持平稳额定扭矩,高速性能优异且过载能力强,短时间可输出远超额定值的力矩。
五、实用运维:常见故障与基础排查方法
电机启动无反应且驱动器报警,可能是哪些原因导致的?
这类故障需从电源、驱动器、指令、反馈四个维度排查。电源方面可能存在供电缺失、电压异常、接线松动或使能回路断开;驱动器可能出现硬件损坏、过温、参数设置错误或初始化失败;指令问题包括上位控制器无输出、信号线路故障或模拟量异常;反馈回路则可能存在编码器线缆损坏、电源缺失或信号异常,此外急停触发或过载保护也会导致电机不动作。
电机运行时出现抖动和异响,该如何初步诊断?
首先检查机械连接:查看负载是否平衡、联轴器是否安装同心、螺栓是否松动,轴承损坏也会导致旋转不平衡;其次排查参数设置,伺服增益(位置环、速度环增益)不合理易引发系统不稳定;再者检查反馈系统,编码器线缆屏蔽不良受干扰或信号异常会传递误差;最后确认供电情况,三相电压不平衡也可能导致运行异常。
如何判断电机发热异常是负载问题还是自身故障?
可通过 “空载测试” 初步判断:断开机械负载(脱开联轴器)后单独运行电机,若空载时发热正常,则故障多源于负载过大、传动卡死或惯量不匹配;若空载仍发热,则可能是电机本身问题,如绕组匝间短路、绝缘老化,或驱动器参数设置不当(如脉冲频率过高、加减速时间过短)导致电流增大,也可能是散热风扇故障、通风堵塞等散热问题。
进行伺服电机维修时,必须遵守哪些安全规范?
维修核心原则是 “安全第一”:操作前需完全切断主电源和控制电源,对驱动器内部大电容进行放电;严格遵守设备操作规程,防止意外启动;涉及驱动器硬件检测(如测量电路板电压)时,需具备专业知识,避免触电或二次损坏;清洁编码器等精密部件时,需使用专用工具和清洁剂,防止损坏敏感元件,复杂故障建议交由专业人员处理。
六、选型依据:不同场景的选择逻辑
在消费类设备中,如何判断应选用伺服电机还是步进电机?
需结合成本、精度、负载特性综合判断:若设备对精度要求不高、速度较低、负载稳定且预算有限,如桌面 3D 打印机、小型扫描仪,步进电机是经济选择;若设备需要高精度定位(如高端美容仪器的机械臂)、高速运行(如高速包装设备)或应对动态负载(如智能分拣设备),即使成本较高,也需选用伺服电机以保证性能。
伺服电机选型时需重点关注哪些参数?
核心参数包括额定功率、额定转速、额定扭矩(需匹配负载大小,考虑短期过载需求);控制精度(由编码器分辨率决定,需符合设备定位要求);惯量匹配(电机转子惯量与负载惯量需在合理比例,避免影响响应速度);电源规格(需与现场供电匹配);安装尺寸(结合设备空间限制),同时需明确控制模式需求(位置 / 速度 / 力矩)。
免责声明:文章内容来自互联网,本站仅提供信息存储空间服务,真实性请自行鉴别,本站不承担任何责任,如有侵权等情况,请与本站联系删除。


